
Sensor a laser CMOS
Série LR-Z
Sensor a laser CMOS Série LR-Z

Novo Padrão!
Sensor a Laser Para Todas As Finalidades
Detecção de posição, contraste e transparência.
- Corpo pequeno
- O espaço de montagem é de 25,4 mm
- Função U.C.D.

Sensor a laser capaz de detectar alvos com base em posição e contraste. (distância de detecção: até 500 mm)

Recursos
Máxima estabilidade nas detecções

A função U.C.D. exclusiva da LR-Z permite a detecção estável de alvos transparentes, metálicos ou escuros. Esta série também pode detectar puramente com base na distância, independentemente de formato, cor ou acabamento da superfície.
Resistente e com longa vida útil

O grau de proteção IP68/69K significa que o LR-Z está pronta para os ambientes fabris mais hostis. Lavagem com água, pulverização de óleo e muitos produtos corrosivos não são um problema para a carcaça de aço inoxidável. Além disso, impactos físicos ou até mesmo aperto excessivo não serão um problema, devido ao design altamente resistente.
Operação simplificada

A configuração simples e a facilidade de colocar em operação, são os diferenciais do LR-Z. Basta apenas 1 toque para configurar o sensor. Além disso, conta com um indicador visível e um display, tornando o sensor muito fácil de usar.
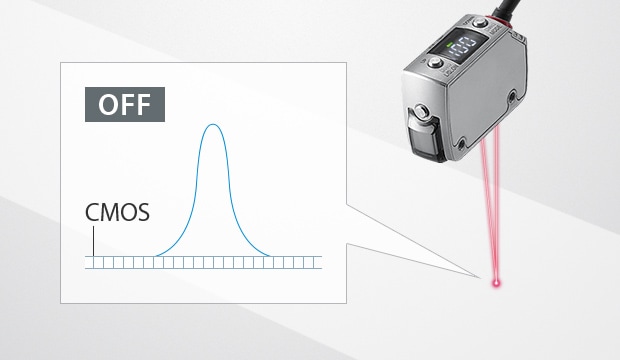
Novo recurso de função U.C.D Distinguindo Um Alvo De Um Fundo Usando a Distância E a Luz Recebida
O sensor primeiro registra a distância até o fundo e a luz recebida, que são usados como referência, e então detecta o alvo por meio de sensoriar se a distância ou a luz recebida diferem da referência registrada quando um alvo entra na área de detecção. Com o fundo, a detecção estável do alvo é assegurada mesmo que o alvo seja um objeto de formato complexo, tenha mudanças na cor e na condição da superfície ou seja um objeto fino com uma diferença de altura pequena.
Sem Alvo
Com Alvo
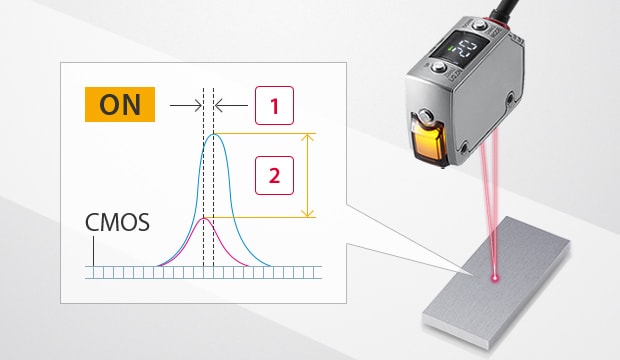
-
1Diferença na distância
-
2Diferença na luz recebida
Objetos Transparentes
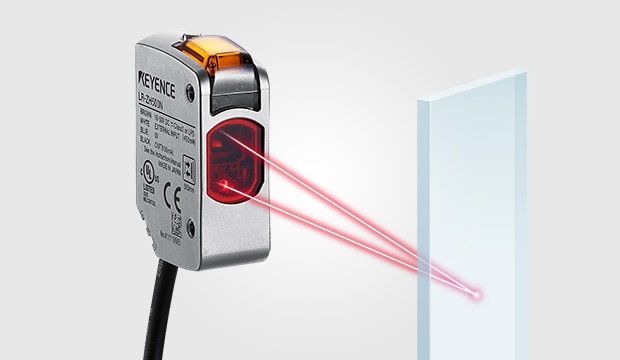
O ajuste do fundo permite que a mudança na luz recebida seja monitorada. O LR-ZH pode detectar objetos transparentes por meio de sensoriar a mudança na luz recebida do fundo registrado. Embora seja um modelo do tipo de ajuste de distância, sua versatilidade permite a detecção até mesmo de objetos transparentes se houver um fundo.